

Сферическая астрономия и кватернионы
А.А.Дмитриевский
Сферическая астрономия занимается изучением видимых положений и движений небесных объектов. В связи с этим её основополагающей задачей является введение систем небесных координат и установление связей между ними.
С этой целью традиционно вводится небесная сфера, а связь между координатами устанавливается с помощью формул сферической геометрии.
Однако эти задачи можно решать совсем по–другому, — кватернионы для этого идеально подходят.
Итак, приступаем.
Вся теория строится для какого–то конкретного наблюдателя, поэтому начало координат помещают в ту точку, где находится наблюдатель.
Далее будем считать для определённости, что наблюдатель находится в Северном полушарии Земли.
Видимые положения небесных объектов характеризуются только лишь направлениями на объект, которые, как известно, задаются в сферической системе координат двумя углами θ и φ.
Или, что то же самое, каждое направление характеризуется тремя направляющими косинусами:
x/r = sinθ′ · cosφ′,
y/r = sinθ′ · sinφ′,
z/r = cosθ′,
здесь штрихи при φ′ и θ′ введены для того, чтобы избежать в дальнейшем пересечения обозначений, x , y , z — декартовы координаты,  .
.
Поэтому направление на небесный объект будем задавать чисто мнимым (векторным) кватернионом с единичным модулем:
q = sinθ′ · cosφ′ · i + sinθ′ · sinφ′ · j + cosθ′ · k,
q · q* = 1,
здесь i, j, k — мнимые единицы, а не орты декартовой системы координат.
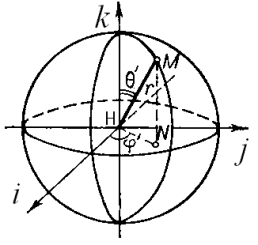
Каждая мнимая единица, как и любой другой кватернион, задаёт после выбора декартовой системы координат какое–то вполне определённое направление. Поэтому в дальнейшем, вместо того, чтобы как-то определять декартову систему координат, будем сразу задавать направление кватернионов i, j, k, а затем применять приведённое выше общее выражение для кватернионов с направляющими косинусами.
1. Основные направления.
Основные направления — это особые, объективно выделенные направления, именно поэтому они являются опорными при введении систем небесных координат.
Отвесная линия, зенит, надир.
Отвес — это небольшой груз на шнурке, указывающий направление силы тяжести.
Отвесная линия, т.е. линия отвеса, задаёт два основных направления, которые называются:
— зенит, соответствующее направление противоположно силе тяжести,
— надир, соответствующее направление совпадает с силой тяжести.
Ось мира, Северный и Южный полюс мира.
Наблюдателю представляется, что всё небо вращается как единое целое вокруг оси мира, которая задаёт два направления, — на Северный и на Южный полюс мира.
Наблюдателю представляется, что вращение неба в окрестностях Северного полюса мира происходит против часовой стрелки, а в окрестностях Южного — по часовой стрелке.
Есть и другие основные направления, которые имеют отношение к эклиптике, а также к срединной линии Млечного Пути. Здесь они не рассматриваются.
2. Основные направления небесного меридиана.
 Ось мира и отвесная линия задают плоскость небесного меридиана.
Ось мира и отвесная линия задают плоскость небесного меридиана.
В этой плоскости расположены направления на полюса мира, зенит, надир, и, кроме того, выделяют ещё четыре направления: на север и юг, а также наивысшую и наинизшую точки небесного экватора.
Направления на север и юг перпендикулярны отвесной линии, при этом направление на север ближе (в угловой мере) к Северному полюсу мира, чем к Южному полюсу.
Направления на наивысшую и наинизшую точку небесного экватора перпендикулярны оси мира, при этом направление на наивысшую точку экватора ближе (в угловой мере) к зениту, чем к надиру.
3. Горизонтальная система координат.
Любое произвольное направление задаём кватернионом:
q = sinθ′ · cosφ′ · i + sinθ′ · sinφ′ · j + cosθ′ · k,
Теперь определимся с направлениями i, j, k, составляющими правую тройку.
Пусть k = kг — направление на зенит, тогда θ′ — угол между направлениями на зенит и на светило, иначе говоря, это зенитное расстояние светила. Астрономы обозначают его буквой z.
Итак θ′ = z.
Отсюда z = 0° — направление на зенит,
z = 180° — направление на надир.
Множество направлений, удовлетворяющих условию z = 90° задаёт плоскость математического горизонта.
Во всех остальных случаях условие z = const задаёт тот или иной альмукантарAт.
Наконец, вместо зенитного расстояния, z, нередко применяется высота светила, h, которая удовлетворяет условию
h + z = 90°,
таким образом, высота отсчитывается не от Северного полюса мира, а от математического горизонта.
В частности, для математического горизонта h = 0°.
Если h>0°, то светило находится над математическим горизонтом, h < 0°, наоборот, под горизонтом.
Примем, что i = iг задаёт направление на юг. Тогда при z = 90° и φ′ = 0°, φ′ = 90°, φ′ = 180°, φ′ = 270° получим направления на юг, на восток, на север и на запад соответственно, лежащие в плоскости математического горизонта.
Однако, в астрономии принято обратное направление возрастания величины углов в плоскости математического горизонта, а именно, углы возрастают от точки юга по направлению движения небесной сферы, т.е. к западу.
Поэтому следует положить φ′ = – А; угол А называется азимутом.
Тогда направление на светило в горизонтальной системе координат будет задаваться кватернионом:
q = sinz · cosA · iг – sinz · sinA · jг + cosz · kг.
Плоскость небесного меридиана содержит все направления, удовлетворяющие условиям А = 0° и А = 180°.
Множество направлений, удовлетворяющих условию А = const, называется вертикалом или кругом высоты.
Плоскость первого вертикала содержит все направления, удовлетворяющие условиям А = 90° и А = 270°.
4. Первая экваториальная система координат.
Она вводится аналогично горизонтальной системе координат.
Снова определимся с направлениями i, j, k, составляющими правую тройку.
Пусть k = kэ — направление на Северный полюс мира, тогда θ′ — угол между направлениями на Северный полюс мира и на светило, иначе говоря, это полярное расстояние светила.
Астрономы редко пользуются полярным расстоянием, вместо него они предпочитают склонение δ, которое аналогично высоте h в горизонтальной системе координат:
δ + θ′ = 90°.
Множество направлений, удовлетворяющих условию θ′ = 90° или δ = 0°, задаёт плоскость небесного экватора. Теперь понятно, что склонение, — это угол, отсчитываемый от небесного экватора, и, следовательно, является аналогом географической широты.
Поэтому δ = +90° — направление на Северный полюс мира,
δ = –90° — направление на Южный полюс мира.
Во всех остальных случаях условие δ = const задаёт небесные параллели.
Условие δ>0°, означает, что светило находится в Северном полушарии неба, а условие δ < 0°, наоборот, — в Южном полушарии неба.
Примем, что i = iэ задаёт направление на наивысшую точку экватора. Тогда при δ = 0° и φ′ = 0°, φ′ = 90°, φ′ = 180°, φ′ = 270° получим направления на наивысшую точку экватора, на восток, на наинизшую точку экватора и на запад соответственно, лежащие в плоскости небесного экватора.
Однако, в астрономии принято обратное направление возрастания величины углов в плоскости небесного экватора, а именно, углы возрастают от точки наивысшей точки экватора по направлению движения небесной сферы, т.е. к западу.
Поэтому следует положить φ′ = – t. Угол t называют часовым углом.
Тогда направление на светило в первой экваториальной системе координат будет задаваться, после замен θ′ = 90° – δ и φ′ = – t кватернионом:
q = cosδ· cost · iэ– cosδ· sint · jэ+ sinδ· kэ.
Плоскость небесного меридиана содержит все направления, удовлетворяющие условиям t = 0° и t = 180° или что, то же самое, t = 0h и t = 12h (часовой угол традиционно измеряется в часовой мере, 12h — 12 часов).
Плоскость первого вертикала содержит все направления, удовлетворяющие условиям t = 6h и t = 18h .
Наконец, множество направлений, удовлетворяющих условию t = const, называется кругом склонений.
5. Высота Северного полюса мира над горизонтом численно равна географической широте.
Ось Земли и ось мира параллельны (или совпадают, если наблюдатель находится на полюсе Земли).
Почему?
Из классической механики известно, что:
1. Вращение характеризуются вектором угловой скорости. Длина этого вектора задаёт угловую скорость вращения, а его направление — ось вращения.
2. Все точки абсолютно твёрдого тела вращаются с одинаковой угловой скоростью, а точнее, вектор угловой скорости одинаков для любой точки абсолютно твёрдого тела. Поэтому оси, вокруг которых вращаются все точки тела, параллельны (или, в частных случаях, совпадают).
Как известно, вращающуюся вокруг своей оси Землю можно считать абсолютно твёрдым телом, поскольку она практически не деформируется в результате осевого вращения. Поэтому все точки поверхности Земли вращаются вокруг параллельных или, в частном случае, вокруг совпадающих осей.
Итак, ось Земли и ось мира параллельны.
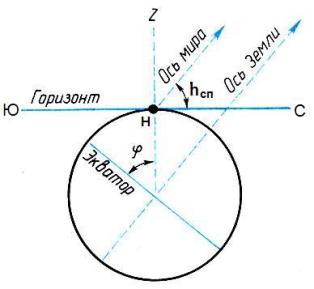
На рисунке изображены высота полюса Северного мира над горизонтом, hсп, и географическая широта, φ, согласно их определениям.
Из рисунка следует, что высота полюса мира над горизонтом численно равна географической широте наблюдателя.
hсп = φ ,
как углы с взаимно перпендикулярными сторонами: отвесная линия перпендикулярна горизонту, а ось мира перпендикулярна земному экватору.
6. Связь между горизонтальной и первой экваториальной системой координат.
Посмотрите на рисунок, где плоскость небесного меридиана показана со стороны востока.
Если ось мира повернуть вокруг оси j, направленной из центра, т.е. от наблюдателя, в сторону востока, в положительном направлении на угол 90° – hсп = 90° – φ, то она совпадёт с отвесной линией. При этом направление из центра, т.е. от наблюдателя, к востоку не изменится.
На языке кватернионов это можно записать так:
kг = (cosα + jэ · sinα) · k э · (cosα – jэ · sinα),
jг = jэ,
Очевидно, что направление iэ тоже должно преобразовываться аналогично:
iг = (cosα + jэ · sinα) · iэ · (cosα – jэ · sinα),
здесь буквой α обозначена половина угла поворота, α = (90° – φ)/2, чтобы короче записывать формулы.
Выполним необходимые вычисления:
iг = (cosα + jэ · sinα) · iэ · (cosα – jэ · sinα) =
cos2α· i э + sinα · cosα · jэ · iэ – cosα · sinα · iэ · jэ – sin2α · jэ · iэ · jэ =
cos2α · iэ – sin2α · kэ = sinφ · iэ – cosφ · kэ
т.к. jэ · iэ = – iэ · jэ = – kэ, jэ · iэ · jэ = – jэ2 · iэ = iэ .
Аналогично
kг = cosφ · iэ + sinφ · kэ.
Выполним подстановки, и группируя подобные слагаемые, получаем:
q = sinz · cosA · iг – sinz · sinA · jг + cosz · kг =
sinz · cosA · (sinφ · iэ – cosφ · kэ) – sinz · sinA · jэ + cosz· (cosφ · iэ + sinφ · kэ) =
(cosz · cosφ + sinz · sinφ · cosA) · iэ – sinz · sinA · jэ · (cosz · sinφ – sinz · cosφ · cosA) · kэ
С другой стороны
q = cosδ · cost · iэ – cosδ · sint jэ + sinδ · kэ.
В результате получаем формулы перехода от горизонтальной системы небесных координат к первой экваториальной системе:
cosδ· cost = cosz · cosφ+ sinz · sinφ· cosA,
cosδ· sint = sinz · sinA,
sinδ= cosz · sinφ– sinz · cosφ· cosA.
Теперь обратим эти равенства, но сначала обратим равенство
kг = (cosα + jэ · sinα) · kэ · (cosα – jэ · sinα) = QkэQ*,
здесь
Q = (cosα + jэ · sinα) = (cosα + jг · sinα), т.к. jэ = j г.
Умножим обе части равенства на сопряжённые кватернионы:
Q*kгQ = Q*QkэQ*Q = kэ.
Отсюда
kэ = (cosα – jг · sinα) · kг · (cosα + jг · sinα).
jэ = jг ,
iэ = (cosα – jг · sinα) · iг · (cosα + jг · sinα).
Здесь последнее равенство получено аналогично первому.
И далее, выполняя вычисления, аналогичные приведённым выше, получим формулы перехода от первой экваториальной системы небесных координат к горизонтальной системе:
sinz · cosA = – sinδ· cosφ+ cosδ· sinφ· cost,
sinz · sinA = cosδ· sint,
cosz = sinφ· sinδ+ cosφ· cosδ· cost.
Их рассмотренных примеров понятно, что можно не вводить понятие небесной сферы, а все задачи сферической астрономии решать с привлечением кватернионов.
Список литературы
Для подготовки данной работы были использованы материалы с сайта http://vestishki.ru/
Дата добавления: 28.07.2013